全國500萬高清機車電子添乘裝置上市
- 時間:2024-11-19作者:深圳龍鐵高科技術有限公司瀏覽:3016
深圳龍鐵高科技術有限公司專注于機車AI視覺系統,機車自動充電系統,機車智能駕駛系統,機車智能駕駛輔助系統,車鉤碰撞距離檢測系統,智能駕駛感知系統,司機分心駕駛檢測系統,機車500萬高清視頻系統等, 歡迎致電 13826575588
詞條
詞條說明
富士隆第三代機車電子添乘裝置,專業為南車集團打造的一款高性價比,高穩定性的機車產品,此次與南車合作,標志著公司的產品邁上了一個新的高度,硬件部分采用八路高清監視與錄像,除了正常的監控外,還可與軸溫報警裝置,煙霧探測裝置,TAX2通訊裝置進行數據交換,把現場圖像與數據真實還原,地面分析軟件部分主要有:高清圖像區,軸溫顯示區,溫度探測區,煙霧探測區,電表區等,為運行與事故的發生提供了強有力的依據。
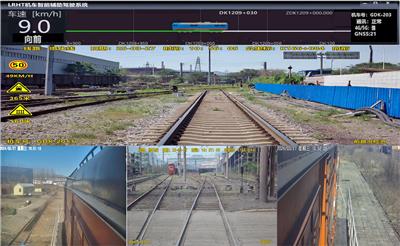
針對SS4型電力機車運輸需求,富士隆專業定制開發了基于SS4電力機車AB兩節高清視頻防火裝置系統,單節機車可同時滿足8-12路高清監控需求,每個監控點可達到數字200萬像素,是真正意義上的數字高清,非傳統監控所能比擬,AB兩節大可滿足24個監控點,滿足不同用戶的訂制,包括大容量硬盤存儲技術,4G網傳技術,友好的人機互看界面,勢必成為未來幾年機車音視頻監控的變革,除了滿足用戶的正常需求(監視、取證
鐵路機車車輛庫房、檢修線路前端都需要設立一個禁動牌的保護標識,防止機車駛入檢修庫停放有機車車輛檢修作業的線路。一般采用移動立式、摘掛式禁動牌,而移動、摘掛禁動牌容易造成因其它原因使禁動牌移位、掉落失效,造成停放有機車車輛檢修作業的人員及設備處于不狀態,如因移動、摘掛禁動牌失效造成有機車駛入,將會造成檢修人員傷害及設備損壞的不良后果。裝置要滿足以下功能:(1)具有強磁吸附功能,在需要使用禁動牌的地方
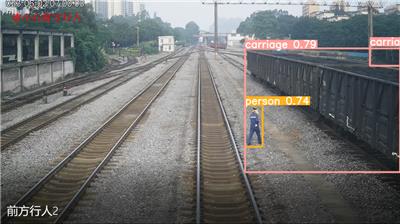
針對端側智能化需求和應用場景,利用海思平臺提供的加速算子IVE,對計算機視覺算法進行芯片級的優化,在保證性能的條件下,提升處理效率,確保系統運行穩定可靠,功耗無明顯上升。
聯系方式 聯系我時,請告知來自八方資源網!
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
電 話: 0755-82596822
手 機: 13826575588
微 信: 13826575588
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
相關推薦




相關閱讀
1、本信息由八方資源網用戶發布,八方資源網不介入任何交易過程,請自行甄別其真實性及合法性;
2、跟進信息之前,請仔細核驗對方資質,所有預付定金或付款至個人賬戶的行為,均存在詐騙風險,請提高警惕!
- 聯系方式
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
手 機: 13826575588
電 話: 0755-82596822
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
- 相關企業
- 深圳市凡可為科技有限公司
- 上海分朗智能科技有限公司
- 深圳市鵬鑫威科技有限公司
- 深圳頭程國際貨運代理有限公司
- 深圳市達普通訊有限公司
- 深圳市科華爾科技有限公司
- 廣州市旺東電子科技有限公司
- 深圳市保駕科技有限公司
- 廣州市騰廣電子科技有限公司
- 商家產品系列
- ic卡
- 安防
- 安全檢查設備
- 安全器材
- 防爆攝像機
- 防盜報警配件
- 防盜報警主機
- 防偽技術產品
- 叫號機
- 接觸式讀卡器
- 鏡頭
- 可視對講產品
- 可視對講外殼
- 槍型機
- 煙感探測器
- 遙控器
- 一卡通系統
- 排隊機
- 探測器
- 探頭
- 電子巡更系統
- 讀卡器
- 對講設備
- 二手安全、防護設備
- 感應卡
- 感應式讀卡器
- 高清攝像機
- 公共廣播系統
- 光端機
- 網絡攝像機
- 產品推薦
- 資訊推薦



¥370.00





¥1098.00



¥1200.00
